
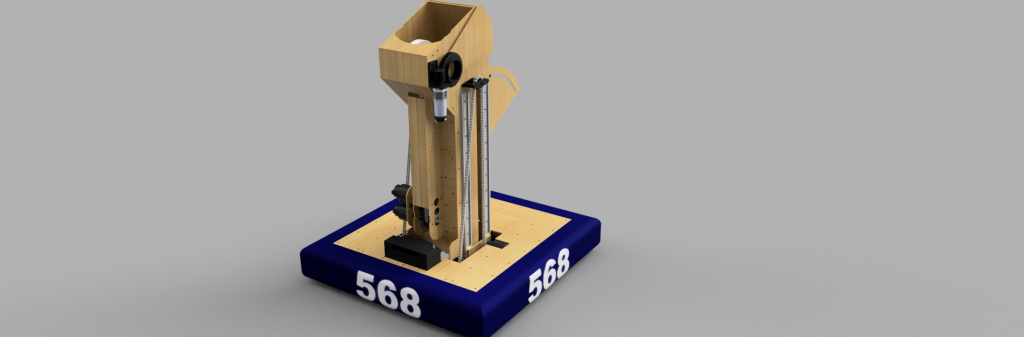
Robot Overview
This year’s robot’s construction is unique from anything we’ve tried in the past. Breaking from the traditional metal design, we opted for plywood with aluminum angle for support. This has allowed more flexibility with the design, cheaper fabrication, faster prototype iteration, and yet still adequate amount of strength for the rigor of this competition. Furthermore, this year’s robot is much smaller and lighter than anything in the past, measuring less than 100 in frame perimeter, and nearly half the weight limit.
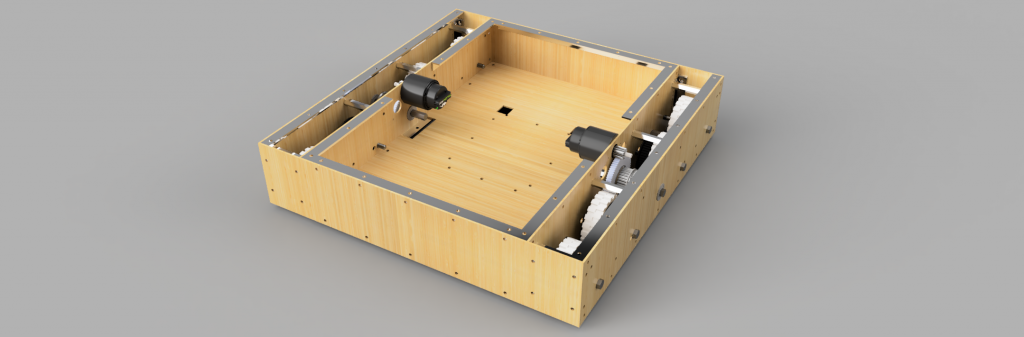
Drivebase
Taking advantage of our robot’s small size and low weight, we tried an entirely new drivetrain this season. Unlike standard 4 CIM drivetrains we’ve relied on in the past like many teams, this year’s robot utilizes just two Falcon 500 motors. The combination of the robot’s lighter weight and increased performance of Falcon 500s mean the robot has similar acceleration and max speed characteristcs as previous robot, but in a fraction of the weight. A single speed, single reduction transmission integrated with the drivetrain is used to power the center two wheels, which are slightly dropped for better turning.
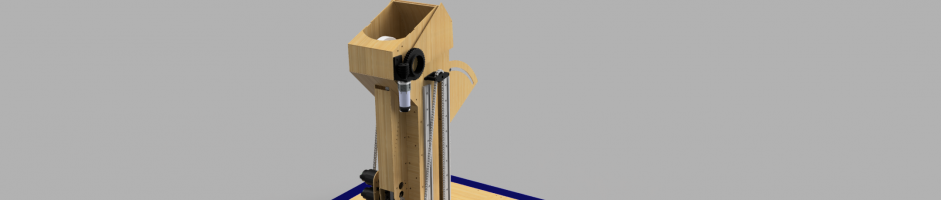
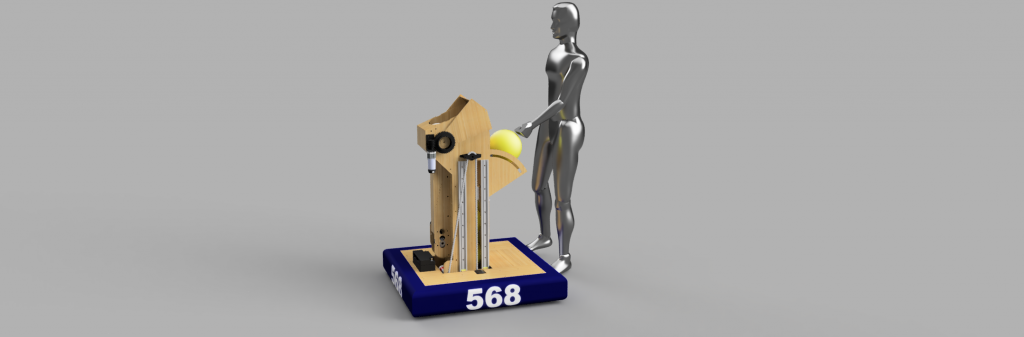
Shooter
Our shooter was built from many lessons learned in last season’s game. It is a single flywheel powered by two Falcon 500 motors, geared at a 3:4 speed ratio. To lower the center of gravity, the motors are placed low to the ground and power is transmitted with belt to a 6 inch flywheel. This gives the shooter a range of over 40 feet, and constant enough for the Interstellar Accuracy Challenge. Balls are fed exclusively from the human player, and loaded into the magazine through an automated hatch powered by a servo.
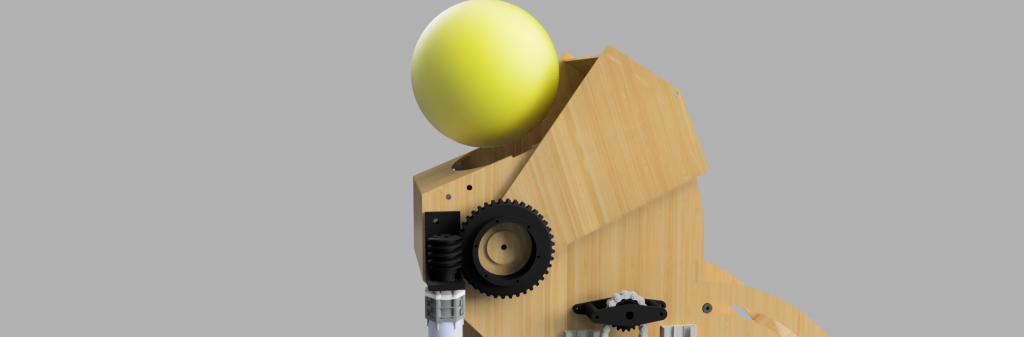
In the magazine, an indexer raises the power cells for shooting. It is powered by an encoded 775 motor and power is transfered to the lifting mechanism with chain, converting into linear motion supported by linear slides. This design prevents balls from sticking when rubbing against one-another, instead staying idle as it is lifted. The motor is capable of discharging all three balls in under two seconds for fast cycle times.
The top of the shooter has a duct to adjust the ball’s trajectory, allowing anywhere from a 60o angle from the horizon to a completely horizontal shot. This is powered by an encoded 550 motor.

Strategy
For this year’s strategy we decided to create a robot capable of all challenges presented in the competition to give us options depending on our robot’s performance in each. Learning from last season, we decided to simplify the design considerably to rely exclusively on loading from the human player. We also oped for a smaller, more agile robot than done in the past for the driving challenges.
Code
This year’s robot utilizes many autonmous features to supplement the driving and complete the autonomous based challenges. All six motors are encoded, giving position feedback to drive, velocity control for the shooter, precise angle control for the shooter hood, and single ball discharge for the magazine. Furthermore, by using the new Limelight, we are able to detect the reflective tape around the power ports to receive information about how far the robot is from the power ports. By combining this information with the position feedback on the shooter motors, the robot is able to shoot the power cells accurately into the power ports (Hopefully).
