
2022 Robot Overview
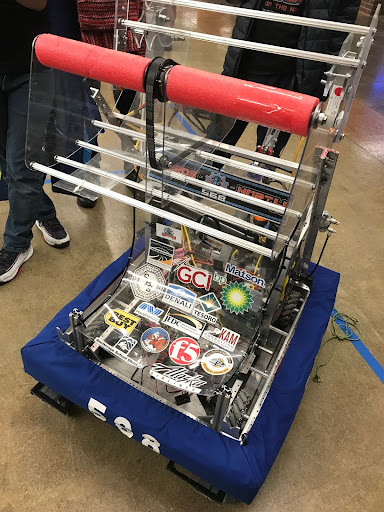
This year, instead of focusing on shooting the balls to the high goal, we decided to deploy them into the low goal to be more consistent. On the left of the image is our intake made of lexan and pool noodles. We also have a pneumatic lid to keep the ball from immediately ejecting.
Drivebase
We also decided to use a mecanum drivebase to quickly maneuver the robot to intake cargo. Other than the small bump at the middle of the field, there weren’t any obstacles on the field to move over so we decided that mecanum wheels will still allow us to move around the field without much problem. We also used a toughbox micro to directly drive the mecanum wheels from the transmission.
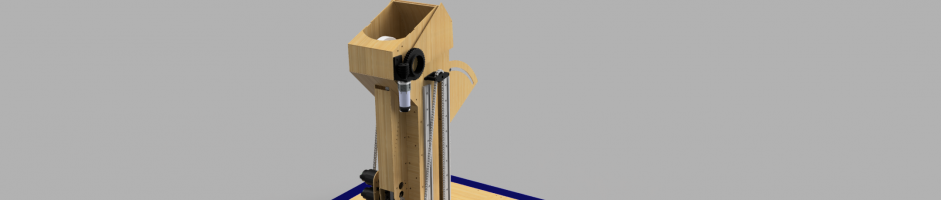
Lyft
Our lift was designed to climb the traverse bar using our main hook in the center while latching onto the bar using our side hooks. The idea for our lift was based on the AndyMark climber, but we ended up designing our own version of it. It was a two stage lift with springs and bearings on the side to support the lift up and reduce friction. At the bottom of the lift, we had a redline motor to winch the lift in, and at the back of the robot, we had a big pneumatic piston to pull/push the lift to traverse to the next bar.

Code
The code for the robot was inspired by the previous seasons that were saved in the GitHub. Originally the code was not suited for a mecanum drivebase however with some quick searches through the documentation we did it. Later when we had a more completed robot the code grew in length. At competition the Pneumatics were added and the code for that did not work at first but after some extensive testing we fixed that too.