Given the circumstances of this season’s abrupt ending, F4 decided to make a “Spring Special” CADathon, which ran from Easter Day to the following Sunday. A CADathon, for those who are unaware, are similar to a hackathon, however instead of programming it is CADing. A game manual of a game similar to FRC is created, along with the Field CAD and Q&A section. Teams have to strategize, design, CAD, and render a virtual robot to complete the challenge that season, all in the constrains of a week. In the past, these were limited to 3 days, so we were giving more time to create a more thoughtful and detailed design. They also changed who was allowed to be on a team, making collaboration within a team easier. This was Lawton’s 5th CADathon, and given these changes, invited others to join him.
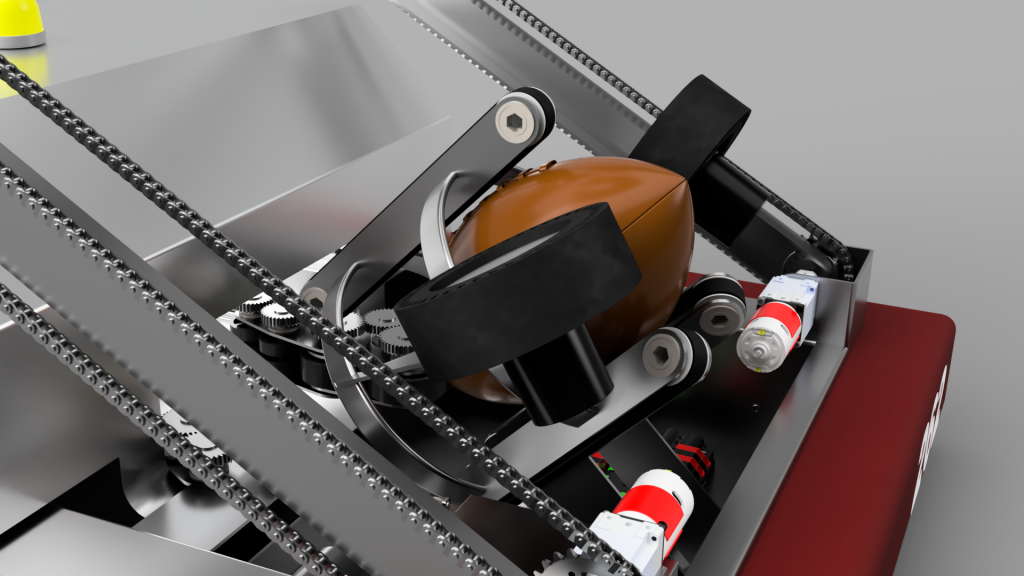
On the first day, we read through the rules (a couple of times!), and began thinking of strategies. Lawton thought the key to a successful robot would be maximize the number of balls able to be scored in a cycle. That night he created a basic model of a “Honeycomb” robot, which could index and store 18 balls! It had a number of flaws, however, including little space for a mechanism to control the other game elements, the weight plates, and difficulty loading and unloading the balls. The next design didn’t index the balls, but had an equally large capacity. It used a drawer mechanism to store balls, either from the ground or human player. Then it would sort them and launched them with a flywheel angled at 30º of each other, to give spin on the ball.
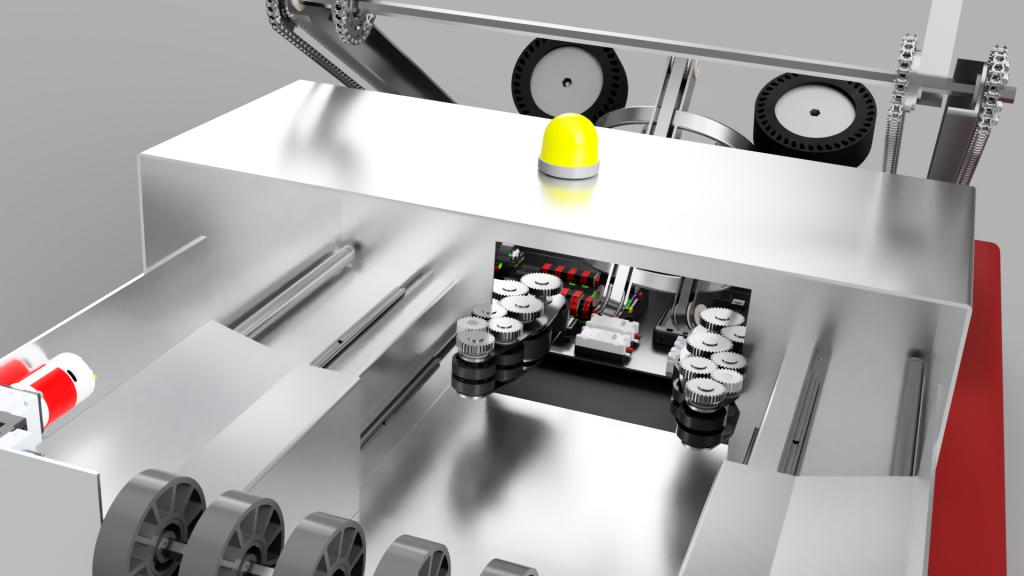
That evening, we had a virtual meeting with other members to discuss strategy and design. Ian, Roach, Alec, and Lawton were all present. After some discussion, we found a large cycle wasn’t as important as first thought, and the weights were more important. We decided to shift attention to creating an efficient weight mover, and reduce the capacity of the football storage if needed to accommodate. Lawton played around with the CAD some more, finished a drive base similar to this season but with 4 falcon motors (cost isn’t nearly as important here), and began looking at weight mechanisms. On Thursday, Lawton reported back what he found and others shared ideas they came up with. We found we were able to fit an arm into the existing design, so kept the drawer collector. Roach proposed some modifications to the indexing module, as well as some thoughts on the lift. With a clear direction of where we wanted to go, Lawton continued to construct the robot.
On Sunday, Lawton worked from 8 am – 3 pm finishing the design. He made some modifications to arm like was discussed, redesigned the indexer, added electronics, and did a lot of rendering and aesthetic changes. With 15 minutes left to spare, we got the model turned in, and are excited to see how it will be scored!
Update: We ended up scoring 63rd place, out of about 100 teams. While not as high we were expecting, the judges gave wonderful feedback about the improvements that could be made to the design. We may have been too optimistic that the arm would be able to lift a 10 pound weight, and there were some great concepts for ground intake mechanisms that would make collection easier. Also there were some elements we didn’t consider like we would have in a usual season, like how bumpers would mount or ability to access electronics. Nevertheless, it was a great learning experience and wonderful to see how other teams solved the issue.